Autonomous Mobile Robot
Background
The navigation of wheeled mobile robot highly depends on the information that it has. For example, the information of the surrounding environment which is represented in the form of Occupancy Grid Map and the information of dynamic environment observed from sensors. To achieve autonomous navigation, a robot is required to be able to plan and move along trajectory. The trajectory is planned dynamically in accordant with moving obstacles. Wheeled Mobile robot is a highly studied topic in today’s world. Many high tech companies are deploying robot to the working environment of their company such warehouse, farm, fulfillment center -etc. That action has resulted in a significant demand of the most high performance and optimally designed robot that can accelerate the work force. Thus, high performance robot need to be equipped with highly advance sensors and devices along with the implementation of complex algorithms. However, it may induce high cost of robot production. The importance of this research is to provide a possible method that utilizes affordable sensors and robots for a commercial product. Long-term goal of this research is to construct an autonomous mobile robot that is able to serve as a transportation of objects from one place to another indoor such as a factory, a shop, -etc.
Publications
|
Local Journal
|
Phayuth Yonrith, Sarot Srang, Morokot Sakal, Boreth Sethy, "Mobile Robot Localization using Extended Kalman Filter with Kinematic Model" Techno-Science Research Journal, 2021.
|
|
Local Journal
|
Boreth Sethy, Sarot Srang, and Daro Van, “Pose Estimation for Differential Drive Mobile Robot using Multi-Sensor Data Fusion,” Techno-Science Research Journal, 2020.
|
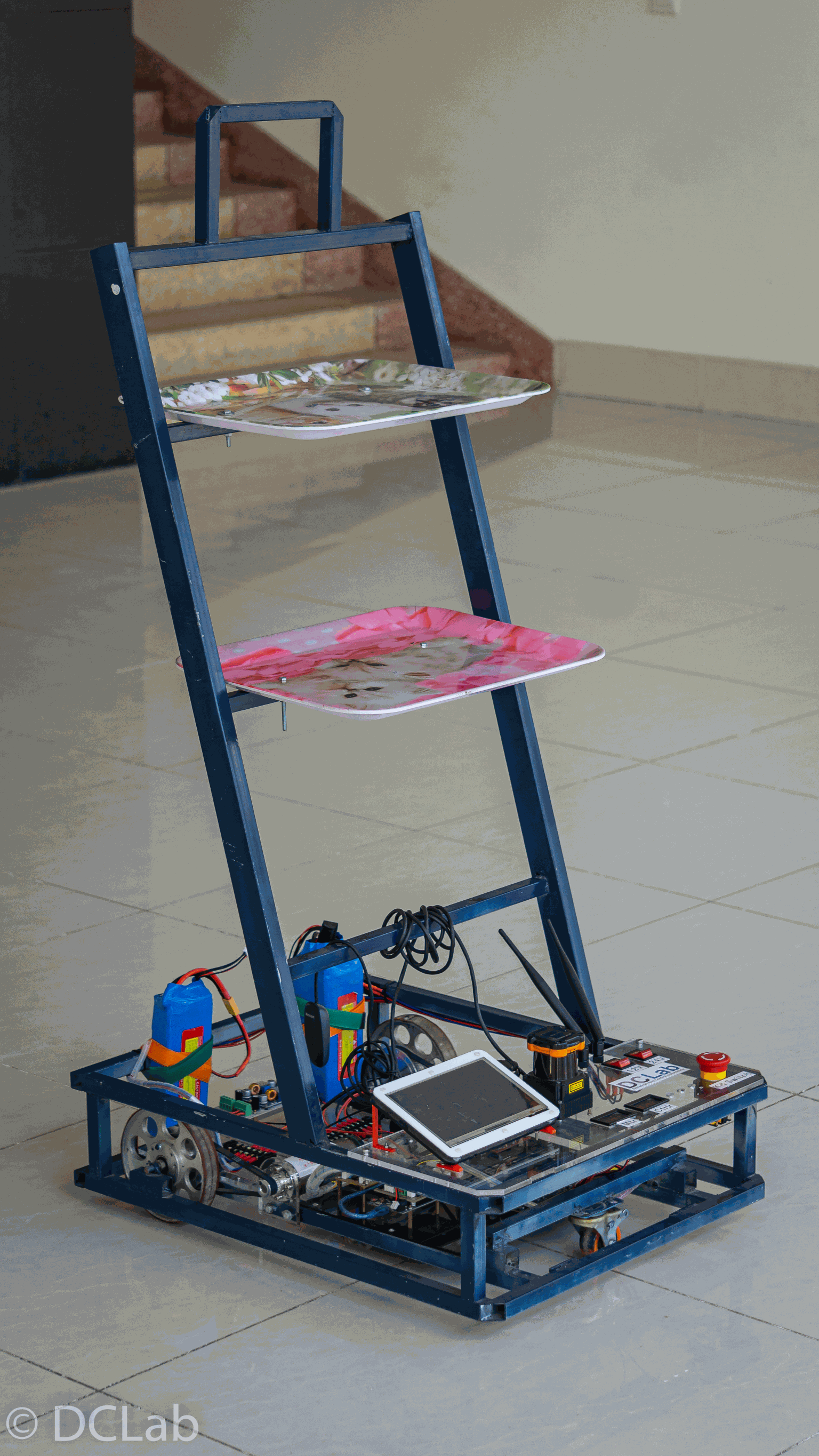
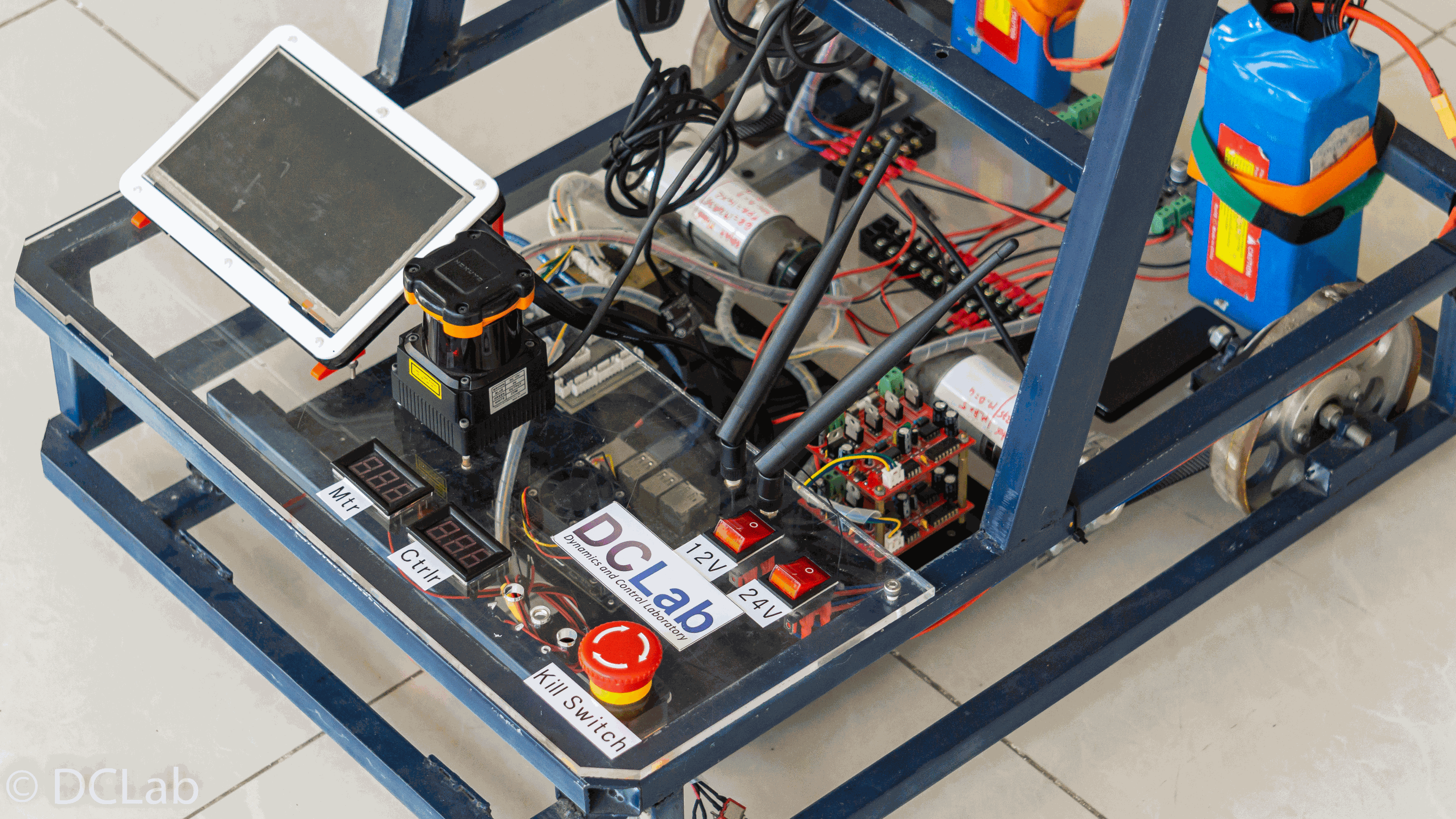
Prototype Robot