fixed-wing unmanned aerial vehicle
Project Description
An unmanned aerial vehicle (UAV) is an aircraft without a human pilot onboard, classified as a type of unmanned vehicle. Historically, the development of UAV systems and platforms has been driven primarily by military objectives and applications. The core missions for UAVs include reconnaissance, which involves obtaining information about specific locations or activities through visual or other detection methods, and surveillance, which entails systematic observation of areas, places, persons, or objects using various means such as visual, aural, electronic, or photographic methods.
The significance of this research lies in transforming data collected by UAV sensors into actionable business insights. The long-term goal is to develop UAVs capable of full functionality in applications such as surveying and mapping construction sites, and monitoring forests (forestry). The specific objectives of this project are to design a method for horizontal landing of a fixed-wing UAV and to develop a flight controller for the fixed-wing UAV that operates in both manual and autopilot modes.
In this research, MATLAB Aircraft Intuitive Design (AID) is used for predicting fixed-wing aircraft stability and control to get the design model and aerodynamics coefficients. CAD software has been used for designing the structure of fixed-wing UAVs. To reach the objective of designing the flight controller, mathematical modeling of the aircraft is described, and its linearization is also included. Then, we analyze the trim condition of the state-space of the linearized model. For flight controller designing, we consider both manual and autopilot modes.
Completed Milestones
Stability and Control Prediction:
Utilized MATLAB Aircraft Intuitive Design (AID) to predict the stability and control characteristics of the fixed-wing aircraft.
Obtained the design model and aerodynamic coefficients necessary for further development.
Structural Design:
Employed CAD software to design the structure of the fixed-wing UAVs.
Completed the detailed structural design, ensuring it meets the required specifications and performance criteria.
Mathematical Modeling and Linearization:
Described the mathematical modeling of the aircraft, including the necessary equations and parameters.
Performed linearization of the model to simplify the analysis and control design process.
Trim Condition Analysis:
Analyzed the trim condition of the state-space of the linearized model.
Ensured the model was correctly trimmed for stable flight under various conditions.
Flight Controller Design:
Designed the flight controller for the fixed-wing UAV, considering both manual and autopilot modes.
Implemented and tested the controller in simulation to verify its performance and reliability.
Adaptive Attitude Controller Implementation:
Successfully implemented an adaptive attitude controller on the quadcopter.
Validated the controller through both simulations and real-world experiments.
Total Energy Control System (TECS) Development:
Developed a TECS for the fixed-wing UAV to manage altitude and velocity.
Successfully implemented and tested the TECS in simulations.
Current Stage:
Additional experiments will be conducted to further validate and refine the hybrid controller.
Future Research Topics
Quaternion-Based Attitude Feedback Control:
Implement attitude feedback control using quaternions to avoid gimbal lock.
Explore the potential for acrobatic motion control enabled by quaternion-based control.
Advanced Acrobatic Maneuver Control:
Develop and test control algorithms for complex and acrobatic maneuvers.
Validate the performance of these algorithms in both simulations and real-world experiments.
Robustness and Fault Tolerance:
Investigate methods to enhance the robustness and fault tolerance of the hybrid UAV control system.
Implement and test these methods under various failure scenarios.
Integration of Additional Sensors:
Integrate additional sensors (e.g., LiDAR, cameras) to improve situational awareness and control accuracy.
Develop sensor fusion algorithms to effectively utilize the data from multiple sensors.
Autonomous Navigation and Path Planning:
Develop algorithms for autonomous navigation and path planning in complex environments.
Test these algorithms in both simulated and real-world scenarios.
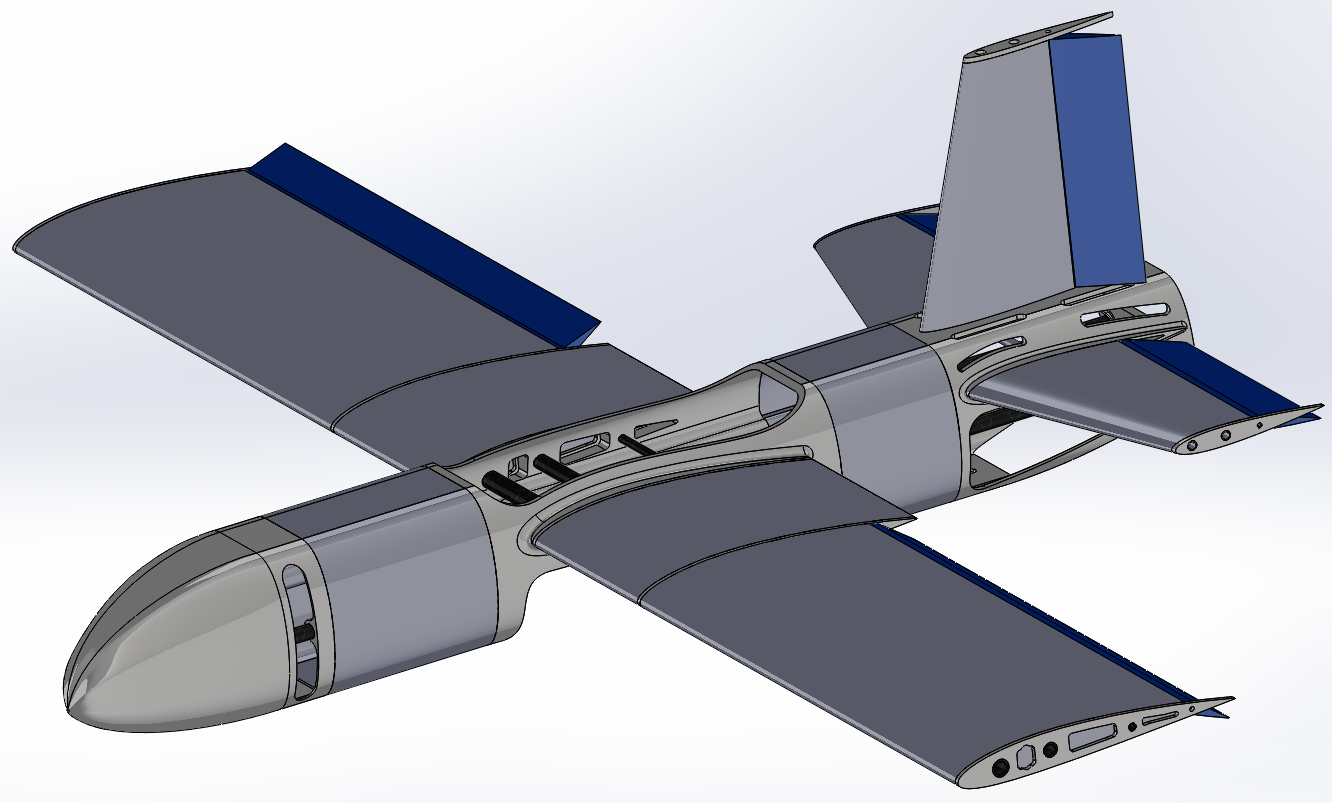
CAD Design
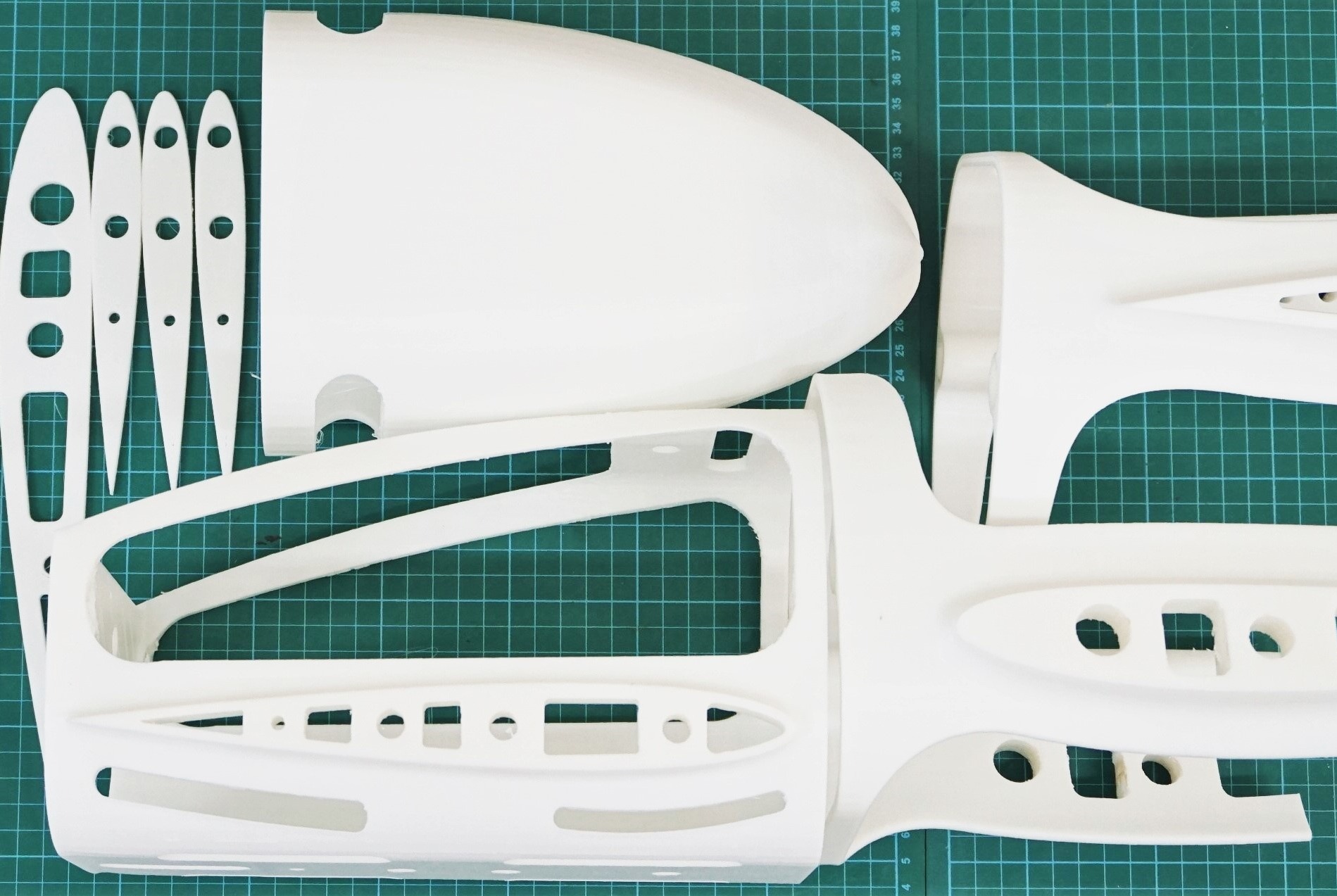
3D Print Part
Filament (PLA): using as the frame rib of the wing, fuselage and the control surface.
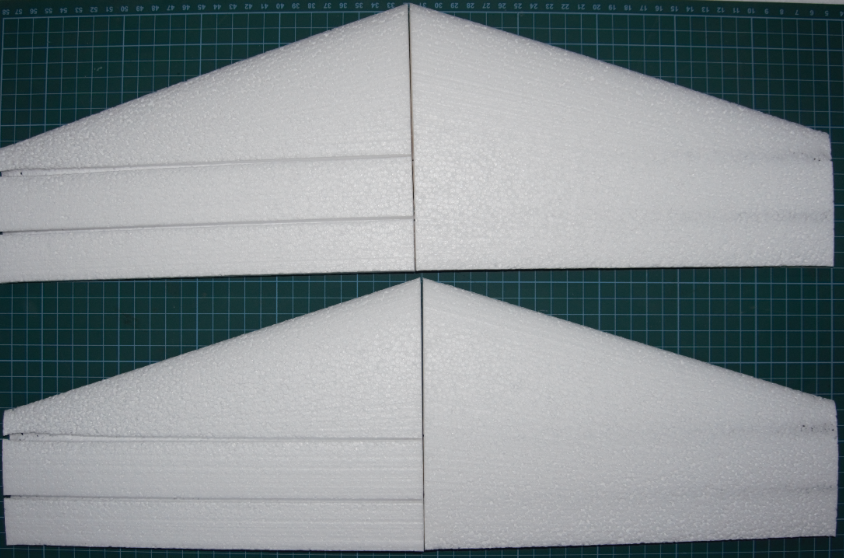
Foam Part
Foam (Polystyrene): using as the wing and body frame of the aircraft.
UAV Airframe Assembly
Airframe Assemble of the UAV second prototype.